Integrated Vision & Motion Control for High-Performance AOI

Traditional Solution
Key Challenges in Traditional Architectures
- High Trigger Delay : Large position error, low accuracy
- Poor Real-time Performance: Unstable cycle time, inconsistent response
- Coupled Control & Vision: Interference between control and vision tasks
- Slow Data Return: Long data path, delays next action
Traditional Solution (Typical)
- Ethernet communication cycle: 5-20ms, causing trigger delay
- Windows OS is non-deterministic, position accuracy affected
- Image processing shares PC resources, impacting control stability
- Slow data return, next action not executed in time
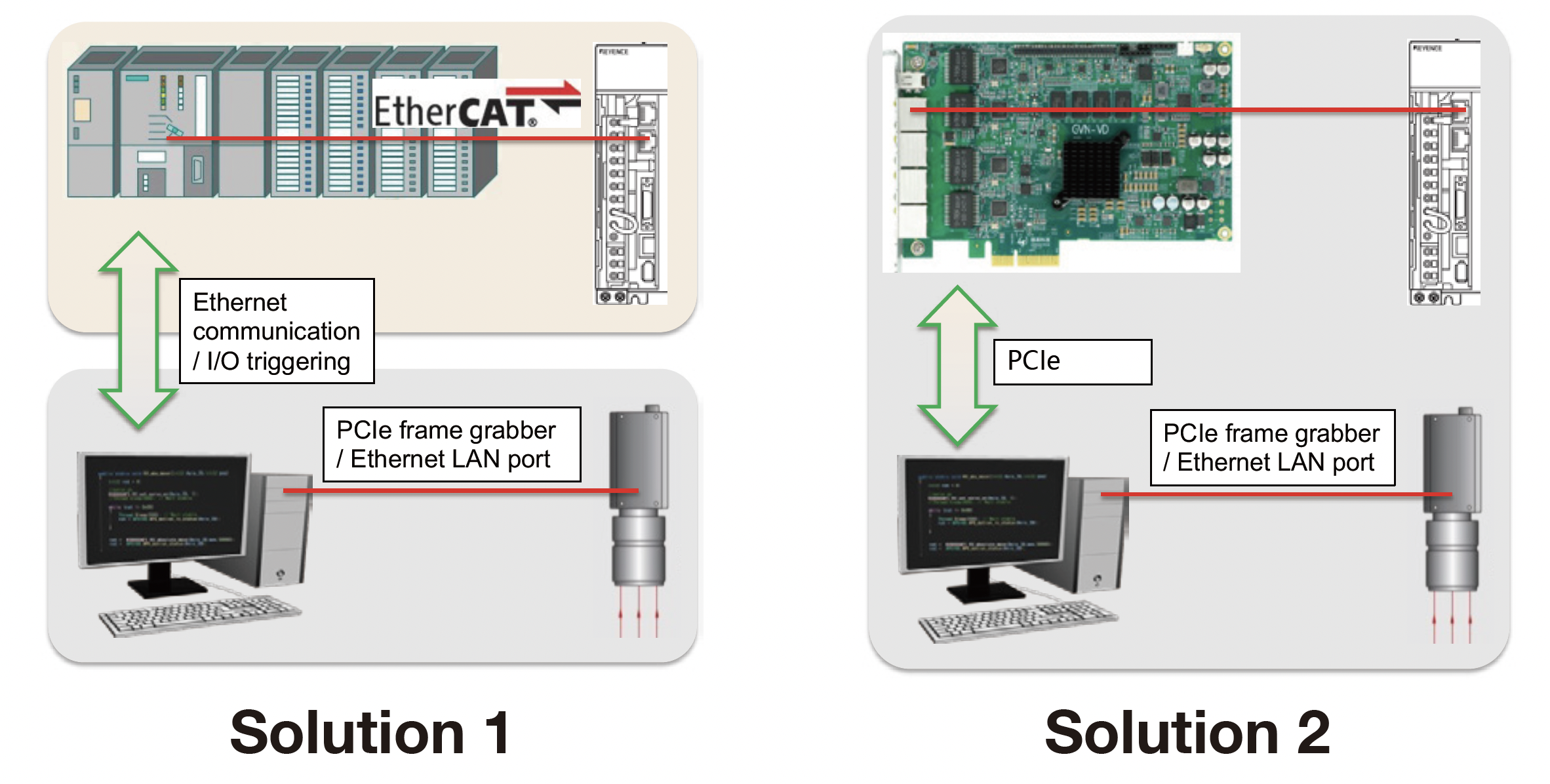
Our Solution: Control + Vision Processing All-in-One Platform
Key Benefits
- High-speed & Accurate Trigger: ROS 125us cycle captures position precisely, shared memory trigger < 0.05ms
- Complete System Isolation: RTOS and Windows run independently; stability guaranteed
- Fast Data Return: Results returned via shared memory < 0.05ms, immediate next action
- Higher Throughput: Faster trigger and data return, significantly improve equipment uptime
- Flexible & Scalable Hardware: ARM / Celeron / Core CPU optional, GPU supported for various workloads
Applications
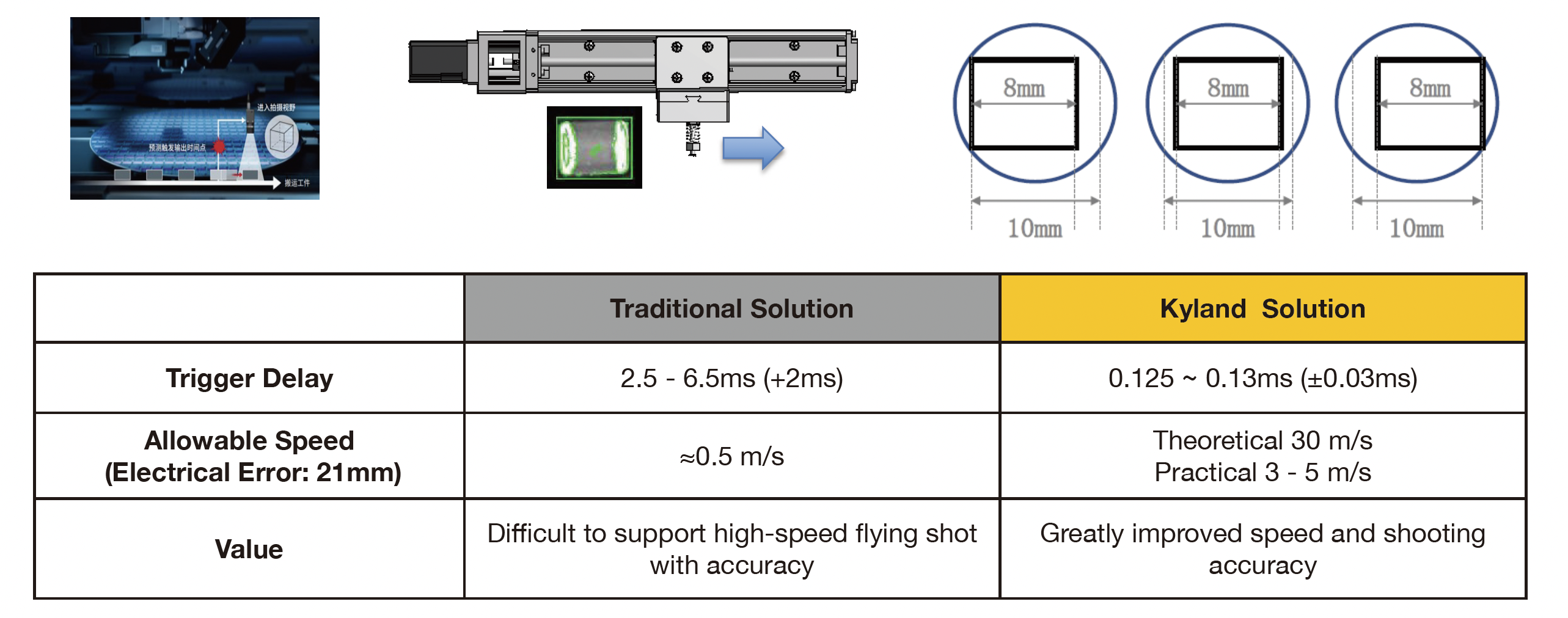
Senario 1: FLYING SHOT INSPECTION (HIGH-SPEED CONTINUOUS)
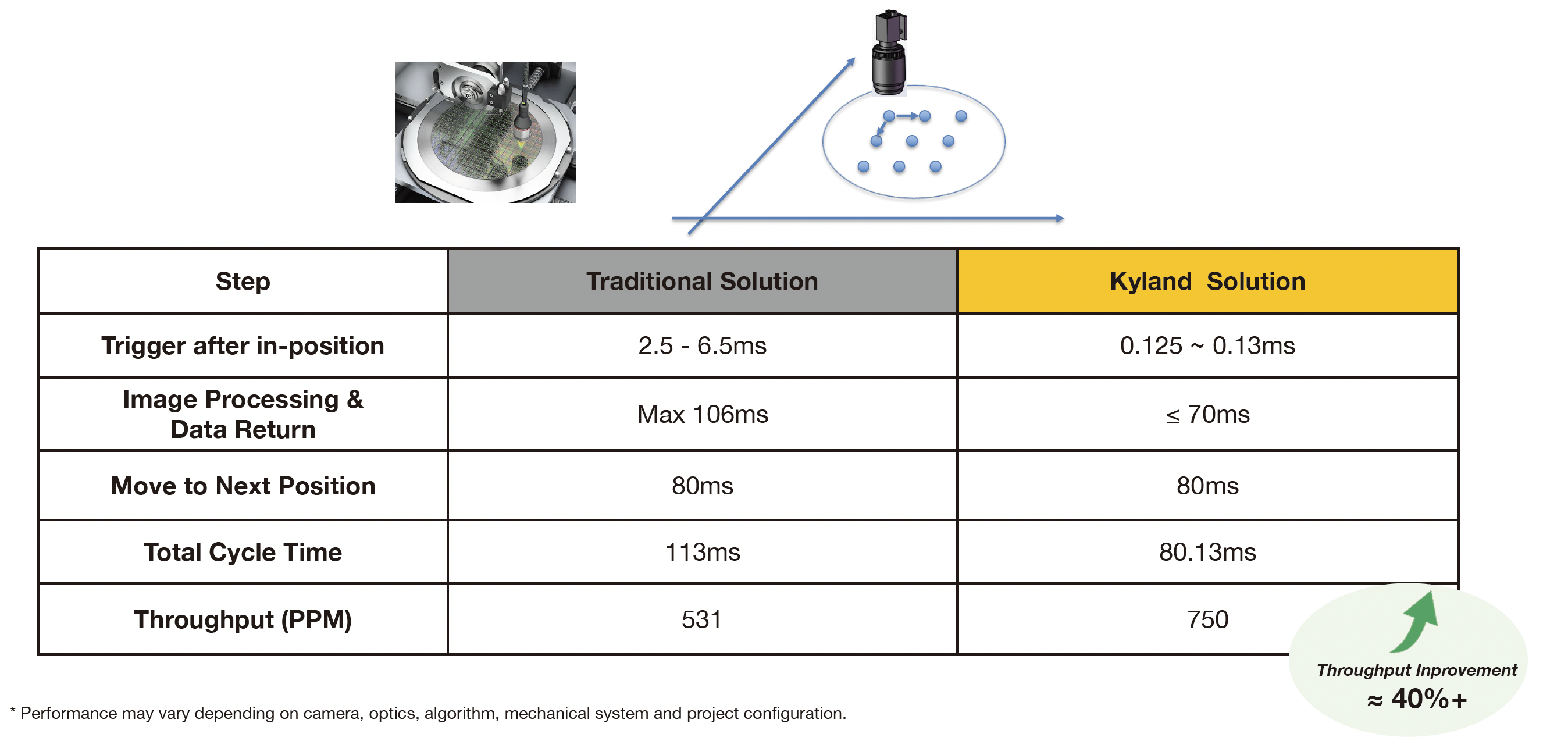
Senario 2: FIXED-POINT INSPECTION (THROUGHPUT OPTIMIZATION)
Solution Highlights
- Higher Speed: Support high-speed production lines
- Higher Accuracy: μs-level trigger, precise positioning
- Higher Stability: System isolation, reliable operation
- Lower Complexity: All-in-one platform, simpler integration
- Stronger Compatibility: Multiple protocols & intertaces supported
- Better Scalability: Flevihle hardware & software expansion
Product Recommendations
- product_catpa_cpuintel-i7fanless-designpa_memory32gb64gbpa_storage2tb1tbpa_network-interfacerj45-x-4wifi4gpa_serial-portcanrs232rs485pa_display-portdphdmivgapa_expansionm-2-slotmini-pcie-slotpa_i-odigital-inputdigital-output
NewPre3101
smart-control-solutionIndustrial Smart Controllerindustrial-smart-controllerALL IN ONE of Edge Computing, Process Control, Machine Vision and Motion Control—Next Generation Industrial Server
- product_catpa_cpuloongsonpa_memory4gbpa_network-interfacerj45-x-4wifi4gpa_usbusb2pa_serial-portcanrs232rs485pa_display-porthdmi
NewPreA5101
smart-control-solutionIndustrial Smart Controllerindustrial-smart-controllerMedium-sized Smart Controller
- product_catpa_cpuloongsonpa_memory4gbpa_network-interfacerj45-x-4wifi4gpa_usbusb2pa_serial-portcanrs232rs485pa_display-porthdmi
NewPreA5102
smart-control-solutionMotion Controller (CODESYS)motion-controller-codesysMedium-sized Smart Controller


